



A raktárban különféle típusú tárolópolcok találhatók, a tárolási és visszavételi módok főként a következő kategóriákba sorolhatók, beleértve a kézi tárolást és visszavételt, a targoncás tárolást és visszavételt, valamint az automatikus tárolást és visszavételt. Napjainkban sok vállalkozás szeretne automatizált raktárüzemet megvalósítani, ezért automatizált raktári polcokat kíván alkalmazni. Például a négyutas autós állvány egyfajta automatizált tároló állvány. Hogyan lép be a raktárba a négyirányú shuttle AGV? A Haigris raktári nehézpolcos gyártóüzem elemezte.

Négyirányú transzfer raktár
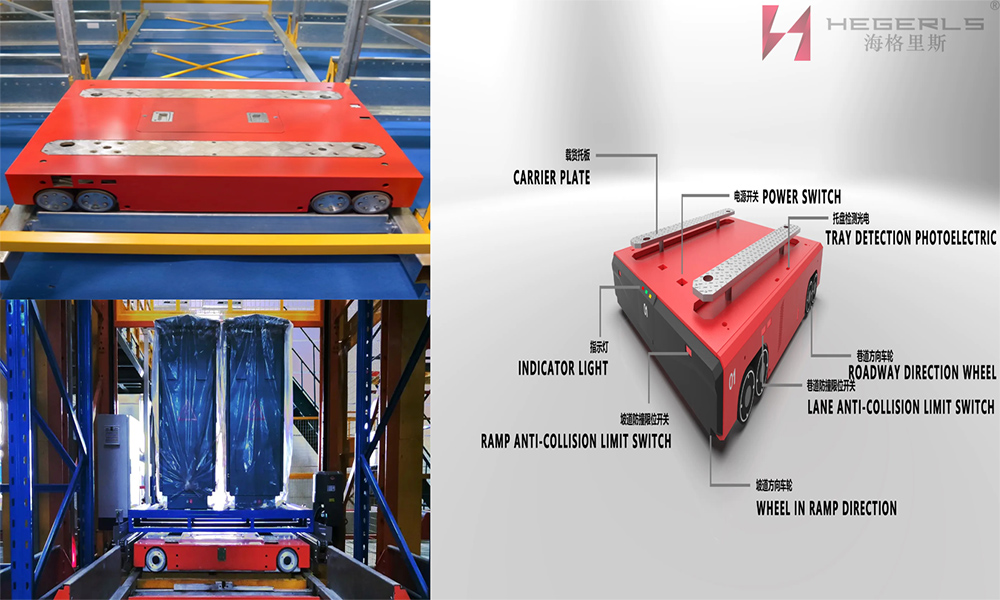
A négyirányú shuttle kocsi 12 kerékkel van felszerelve, amelyek négy irányba tudnak haladni a pályasík mentén, és szabadon elérhetik a raktársík bármely rakterét. A négyirányú siklót a kétoldali kerekek egyidejűleg hajtják, hogy az autó karosszériája működés közben ne hajoljon el, illetve a háromdimenziós polcon felváltva tud haladni a hosszanti és keresztirányú sínek mentén.

Ugyanakkor a négyirányú sikló egy intelligens kezelőeszköz, amely nemcsak hosszirányban, hanem oldalirányban is tud járni. A négyirányú transzfer nagy rugalmassággal rendelkezik, tetszőlegesen változtathatja a munkautat, és a rendszer kapacitását a transzferkocsik számának növelésével vagy csökkentésével állíthatja be. A rendszer csúcsértékére szükség esetén a dolgozó járműcsapat ütemezési módjának kialakításával, a be- és kiszállási műveletek szűk keresztmetszetének megoldásával lehet reagálni, illetve egymással is helyettesíthető, Ingajárat vagy lift meghibásodásakor, egyéb shuttle vagy liftek küldhetők a diszpécserrendszeren keresztül, hogy a műveletet a rendszer kapacitásának befolyásolása nélkül végezzék el. Ez a készülék egyaránt alkalmas alacsony áramlású és nagy sűrűségű tárolásra, valamint nagy áramlású és nagy sűrűségű tárolásra. Nagyobb hatékonyságot, költséget és erőforrásokat érhet el.
Hogyan lép be a raktárba a négyirányú shuttle AGV?

1) Raktározási mód
a) Az intelligens négyirányú sikló technikusai először bekapcsolják az intelligens négyirányú siklót, és előkészítik. Az intelligens négyirányú shuttle készenléti állapotban van;
b) Az intelligens négyirányú sikló komissiózási helyének megerősítése után a WCS megtervezi a vezetési útvonalat az intelligens négyirányú sikló aktuális helyének és célhelyének megfelelően, majd a személyzet kiosztja az árukat az intelligens négyirányú járatnak. transzfer a WCS-n keresztül;
c) Az intelligens négyirányú sikló a kapott feladatparancsnak megfelelően megkezdi a kézbesítési feladat végrehajtását;
d) A keresztező pályán az intelligens négyirányú shuttle elmozdulás üzemmódban halad át a tényleges távolságon. A vezetési folyamat során folyamatosan pásztázza azokat a nyomokat, amelyeken a jármű karosszériájának alsó része áthalad. Minden keresztezési pozíción, amelyen áthalad, a nyomvonalak pásztázásával megítéli és kalibrálja a megtett távolságot. Amikor közel van a célhoz, finomhangolja a parkolási pozíciót az oldalsó lézerérzékelőn keresztül a parkolási pozíció pontos pozicionálása érdekében;
e) Az alcsatornában az intelligens négyirányú shuttle átvizsgálja a keresztirányú pályát és az oldalsó kalibrációs tükör reflektorát, meg tudja ítélni és ellenőrizni tudja a vezetési távolságot a pont pozíciójának pásztázásával, és pontos helymeghatározási vezérlést ér el az alcsatornában a cél elérése érdekében;
f) Amikor az intelligens négyirányú shuttle megérkezik a kiválasztott komissiózási pozícióba, a raklap leesik, az áru a polcra kerül, és a WCS rendszer értesítést kap a szállítási feladat elvégzéséről;
g) Az intelligens négyirányú sikló továbbra is megkapja a feladatra vonatkozó utasításokat, vagy visszatér a készenléti területre.
2) Szállítási mód
a) Az intelligens négyirányú sikló technikusai először bekapcsolják az intelligens négyirányú siklót, és előkészítik. Az intelligens négyirányú shuttle készenléti állapotban van;
b) Az intelligens négyirányú sikló komissiózási helyének megerősítése után a WCS megtervezi a vezetési útvonalat az intelligens négyirányú sikló aktuális helyének és célhelyének megfelelően, majd a személyzet elküldi a komissiózási feladatot az intelligens négyesnek. - transzfer a WCS-n keresztül;
c) Az intelligens négyirányú transzfer a kapott feladatparancsnak megfelelően megkezdi az áruk felvételét;
d) A keresztező pályán az intelligens négyirányú shuttle elmozdulás üzemmódban haladja meg a tényleges távolságot. A vezetési folyamat során folyamatosan pásztázza azokat a nyomokat, amelyeken a jármű karosszériájának alsó része áthalad. Minden keresztezési pozíciót, amelyen áthalad, a nyomok pásztázásával ítéli meg és ellenőrzi a megtett távolságot. Amikor közeledik a célhoz, az oldalsó lézerérzékelőn keresztül finomhangolja a parkolási pozíciót a pontos pozicionálási vezérlés és parkolás érdekében;
e) Az alcsatornában az intelligens négyirányú shuttle kocsi átvizsgálja a keresztpályát és az oldalsó kalibrációs tükörreflektort, ezen pontok pásztázásával megítéli és kalibrálja a vezetési távolságot, és megvalósítja a pontos pozicionálás vezérlését az alcsatornában a cél elérése érdekében. .
Feladás időpontja: 2022. szeptember 19